DEVELOPMENT OF A NEW COURSE ON CONTROL SYSTEMS
The development of a practice-oriented course in control systems technology at the National Cheng-Kung University (NCKU) is presented. This course is a synergistic integration of control engineering with sensors, actuators, PC-based controllers, and intelligent computer controls in the design and synthesis of real-time control systems. Students learn, verify, and realize lecture concepts by performing eight different experiments in the laboratory sessions. They work in teams, choose their experiments, design and implement their systems, document, orally present and demonstrate their experiment results. It is anticipated that the course will shorten the gap between university education and industrial applications. This course was inaugurated in 1995, is currently taken, and will become a regular one for senior and beginning graduate students in the Department of Electrical Engineering at NCKU.
This paper addresses a new course initiated in the Department of Electrical Engineering at NCKU in 1995. The curriculum consists of four credits with a three-hour lecture and a threehour experiment per week and is developed to offer students with a team project experience of practice-oriented control systems technology. Although the course is set up in the Department of Electrical Engineering, some students of Departments of Mechanical Engineering, Aeronautics and Astronautics, and Engineering Science is also enrolled this class.
Dorato [1] surveys the control systems education in the United States for the academic year 1987-1988. As [1] reported, only 50% of the Departments of Electrical Engineering responding required at least one control course in their B. S. E. E. degree program. Feliachi [2] reports another curriculum survey on control education in 1990-1991, where 78% of the Departments of Electrical Engineering and 72.5% of the Departments of Mechanical Engineering have at least one required control course for undergraduate study. There are six departments at NCKU, however, need a required control course in their undergraduate curriculum. These departments include Naval Architecture and Marine Engineering, Aeronautics and Astronautics, Engineering Sciences, Chemical Engineering, Mechanical Engineering, and Electrical Engineering. The subjects of the control course in electrical engineering department contain
We think above contents are adequate for the undergraduate course in control engineering [2], though the topics are concentrated on methodologies and analysis. Some studies [3,4] propose other practical contents for the first course in control engineering. In order to bridge the gap between theory and practice, we establish this new course called "Control Systems Technology and Practice." The purpose of this course is the same as that of two technical journals started in 1993, IEEE Transactions on Control Systems Technology [5] and Control Engineering Practice [6]. This elective course is developed for senior students who have taken the required course, "Control Engineering" (or "Automatic Control"), and are willing to learn more practice-oriented course in control systems technology.
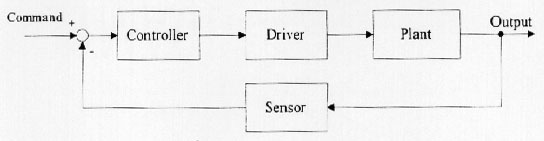
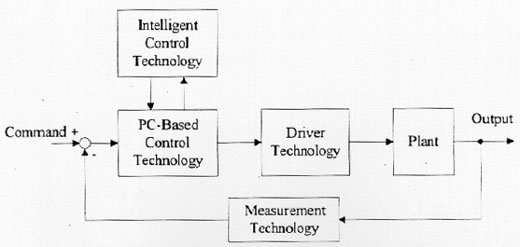
A standard feedback control system is shown in Figure 1. It is seen that a control engineer should possess the ability and knowledge of controller, sensor, actuator, driver, and the plant, then good performance of the closed-loop system can be obtained. However, the first control engineering course, can only provide students to design an analog PID controller. In recent years, many industrial applications, consumer electronics, and studies [7-10] are utilizing digital control associated with microcomputer to promote the performance of products and to train students to have the real-time control ability. In fact, application of PC-based controller is becoming an industrial standard. Another topic should be emphasized is the intelligent control, an emerging technology. Intelligent control including fuzzy control and artificial neural network has been successfully applied to home appliances, consumer electronics, and industrial production. Thus, this new course should comprise measurement technology, actuator and driver technology, PC-based control technology, and intelligent control technology. The system configuration of this course is illustrated in Figure 2. It is found that this course is very similar to a new education curriculum, Mechatronics [ l l - 15] .
This course is inaugurated in the semester system and has three hours of lectures per week for 18 weeks. The topics covered in this course are
Figure 1: A standard Feedback Control Systems up
From the subjects of lecture, one can see that this course is a synergistic integration of control engineering with sensors, PC-based controller, drivers, and intelligent controls in the design and synthesis of real-time control systems. It is not so easy but impossible for one Professor to instruct all these lectures. There are four Professors engaged in this course, where Professor Sun is responsible for the measurement technology, Professor Juang takes charge of the PC based control technology, Professor Lee teaches the driver technology, and Professor Li gives a lecture of intelligent control technology. In fact, this course is considered as an integration of four elective courses enrolled in our department, "Measurement and Control" [16-18]? "Microcomputer and Interface Design" [8- 10], "Power Electronics" [19,20], and "Intelligent control" [21,22]. It is better for senior students to take this course to learn all aspects of control systems technology than to study four courses.
The next major part of the course is dedicated to implement the control engineering practice in laboratory sessions. It also has three hours of laboratory experiments per week for 18 weeks. It is believed that students take their time over "active learning" by making experiments is as important as take their time over "passive learning" through attending lectures. The same features come from some experiment or practice-oriented courses [3,4,7-9,12,19,20,23]. This is the best way to shorten the gap between the theory and practice offered in this course are
For the first ten weeks, they go through every equipment to perform some basic experiments. The following six weeks, they choose their experiments, define their project, design and implement their systems. The last two weeks, each team should orally present and demonstrate their experimental results.
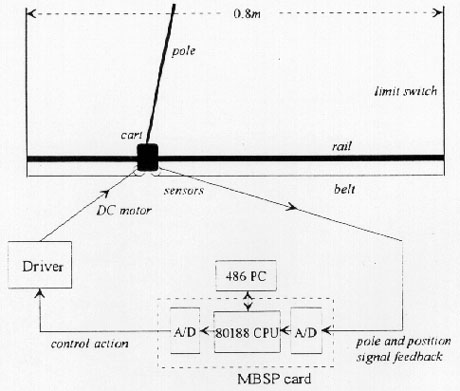
Figure 3: The PC-Based Cart-Pole Control System
Taking the PC-based cart-pole control system for example, the basic experiment is to design a PID controller such that the pole is always upright. The system configuration is depicted in Figure 3. Students first test the characteristics of the sensor -- photo encoder (500 pulse per rotation); examine the DC drives; and write a simple program to check the l/O operations of the MBSP card, an AD/DA and digital signals control card. Finally, a PID control algorithm is realized in C language and is compiled as an execution file. The feedback signal, pole's angle measured by the incremental photo encoder is transmitted via a 25 pin RS 232 transmission line to PC-486. Using the MBSP card, the control action determined by the algorithm is transmitted to driver to rotate the DC servo motor such that the pole never falls down. The final project of one team for this system contain
1) Design a fuzzy logic controller (FLC) for the cart-pole system so that the pole is always upright.
2) Develop an integrated FLC, an integration of PID controller and FLC, such that the pole never falls down.
3) Investigate a parallel FLC such that the cart is able to follow a desired trajectory and the pole is always upright
The first two experimental results can be easily realized form the lecture or the intelligent control technology. For the last experiment, they find a parallel FLC, by taking the experience of balancing a pole by finger, such that the regulation of pole's angle and tracking of cart's position can be obtained simultaneously.
In this paper, we have addressed the development of a new course on control systems technology and practice. Both theory and practice are emphasized in this course. lt is anticipated that this course will bridge the gap between college education and industrial applications. This curriculum was first inaugurated in the Department of Electrical Engineering at NCKU in the fall semester of 1995, where 43 students coming from four departments enrolled this class. The course is originally developed for the senior class However, many beginning graduate students asked us to permit them to attend this class because they did not have any opportunity to enroll this kind of practice-oriented course before. In the fall semester of 1996, there are another 27 students coming from four departments enrolled this class. We think this curriculum will become a regular one for senior and beginning graduate students in our department.
This study is completely supported by the National Science Council, Taiwan, Republic of China under grants NSC 84-2512-S-006-008~012 and NSC 85-2512-S-006-005~009
 Back to Table of
Contents
Back to Table of
Contents